南湖新闻网讯(通讯员 张力)2026年3月3日,麻豆 工学院副研究员陈耀晖与麻豆 副教授李伟夫在Plant Phenomics上合作发表了题为”InspectGaussian: Large-Scale Coarse-to-Fine Gaussian Reconstruction for Orchard Inspection Robots”的研究论文,为果园智能监测和管理奠定了基础。
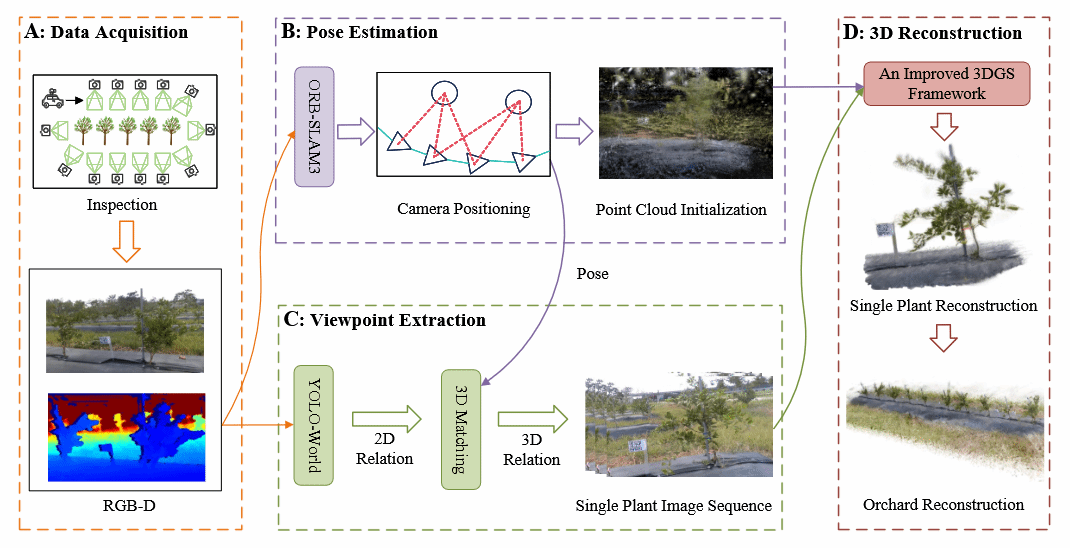
图1:果园重建框架。A.基于巡检机器人和RGB-D图像的数据采集。B.基于SLAM的姿态估计。C.利用2D和3D匹配提取单株植物视点。D.利用3DGS对单株植物重建进行细化,生成最终的大比例尺果园图
果园环境的高效大规模3D重建对于机器人检测和精准农业至关重要,但现有方法难以应对非结构化场景、可变光照和计算资源瓶颈。为此,本研究提出一个为果园检查机器人量身定制的粗到细高斯重构框架:提出了针对于果园环境的RGBD图像采集策略;基于增加了稠密模块的ORB-SLAM3来实现稳健的大规模姿态估计和点云生成;随后通过基于YOLO-World的检测和3D匹配算法提取单个植物视图;最后采用分而治之的策略,使用改进的3DGS对每个植物进行重建。
在柑橘果园的实验结果表明,InspectGaussian在植物视图提取中达到了96%的平均精度和93%的召回率,同时在重建保真度(31.226 PSNR, 0.915 SSIM, 0.067 LPIPS)和点云精度(7 mm误差)方面超过了目前最先进的方法。这些结果证实了它在捕获精细结构和纹理细节的同时保持可扩展性和效率的有效性。该框架为高通量的田间植物表型分析提供了实用的解决方案,并为果园智能监测和管理奠定了基础。
该研究的核心贡献主要体现在三个方面。在数据采集策略上,研究团队创新设计了适配果园巡检机器人的专属采集方案,采用沿垄间周边拍摄的方式,替代传统的植物环绕拍摄模式,有效解决了高种植密度场景下机器人多视图捕获的效率难题,为后续技术落地奠定了数据基础。在位姿估计算法层面,研究通过基于RGB-D的SLAM技术(即时定位与地图构建),结合定制化密集映射模块,成功实现了大规模点云的精准生成。该技术可有效缓解果园场景中光照变化、植物间尺度差异较大等问题带来的干扰,大幅提升了位姿估计的准确性与稳定性。在大尺度果园重建方面,研究团队创新性地将3DGS(3D高斯 splatting)技术与深度正则化、区域感知优化相结合,采用“分而治之”的思路,实现了大尺度果园中单个植物的精准重建。
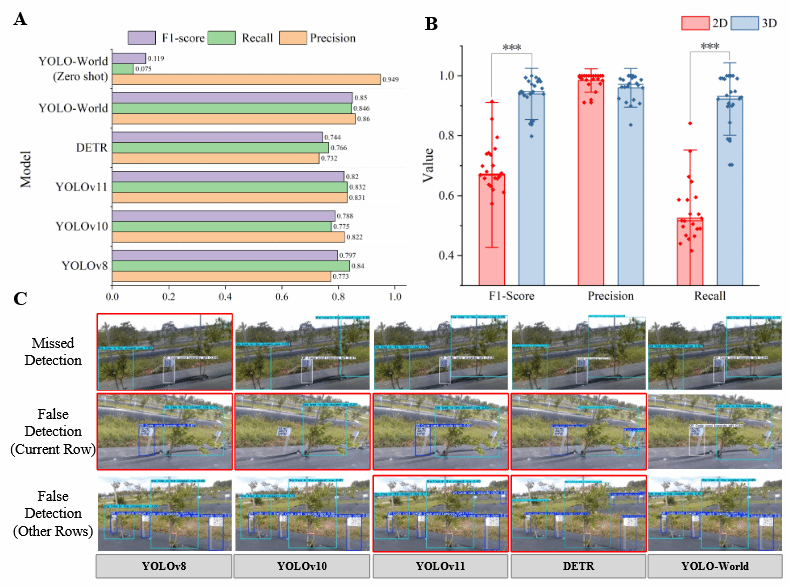
图2:单株植物影像提取实验结果。A.目标检测模型的三重交叉验证的平均性能。B. 2D和3D匹配方法的性能比较。C.目标检测模型的可视化结果。红色突出显示的区域表示检测错误
华中农大麻豆 博士生张力与鲍泽韩为论文共同第一作者,华中农大工学院副研究员陈耀晖与华中农大学麻豆 副教授李伟夫为论文共同通讯作者。陈耀晖,张力,和鲍泽韩负责了论文整体框架、概念、数据收集、算法开发和实验实现,康瀚文、李伟夫、陈洪监督实验各阶段,并修改手稿。
本研究工作得到中国国家重点研发计划(2023YFF1000100)以及中央高校基本科研业务费专项资金(2662024SZ002、2662024XXPY001)资助。
审核:陈耀晖 李伟夫